Paul Thienphrapa
Hi! I am a computer vision and robotics scientist-engineer serving as an expert advisor at ARPA-H. Previously I was a scientist at Philips, AI lead at a health startup, and did a PhD in computer science at Johns Hopkins University. I've built an autonomous robot for heart surgery! I also helped create the da Vinci Research Kit now used worldwide and revealed hard-earned lessons as a medical robotics engineer.
Contact info
find me on linkedin · github
also on scholar · researchgate · ieee
Background
My favorite professional highlights include the end-to-end engineering of robust, real-time systems, combining the ingenuity of multiple disciplines to solve meaningful problems. I am broadly passionate about innovative solutions, systems, and components that emerge from technical, clinical, and practical insights. This has given me fortunate opportunities to design and build complex systems such as dexterous surgical robots, computer vision + AI/ML guidance systems, and autonomous navigation via medical images.
Meanwhile, these are some of the many mentors that have guided my journey:
- Russell H. Taylor, Johns Hopkins University, international celebrity pioneer of medical robotics, who showed me that being the best is fleeting, but persistently improving is real
- Charles Liu, Jane Dong, and Helen Boussalis, Cal State LA, who introduced me to robotics, computer vision, and neural networks; challenged me to convert theory into innovations on live systems; and nurtured my growth as a scientist and engineer
Education
- PhD, Computer Science | Autonomous Surgical Robotics
Johns Hopkins University
Autonomous surgical robot for the heart with 3D ultrasound vision (with R. Taylor) - MSE, Computer Science | Embedded Systems
Johns Hopkins University
Open source robot control system over high speed networks leading to the dVRK (with P. Kazanzides) - MS, Electrical Engineering | Embedded Systems (pending thesis)
California State University, Los Angeles
Reconfigurable, fault-tolerant embedded system for space telescope control (with C. Liu) - BS, Electrical & Computer Engineering
California Institute of Technology
Experience
- Medical Robotics and Autonomous Systems Expert (Present)
Advanced Research Projects Agency for Health / Booz Allen Hamilton, Washington, DC- Lead Engineer and Scientific, Engineering, and Technology Advisor serving the US federal government
- Head advisor for the Autonomous Interventions and Robotics (AIR) program; co-advisor for other initiatives
- Rigorously assess advanced biomedical robotics, AI, and high performance computing systems, advising on substantial investments towards transformative innovations in the public interest
- Manage innovation projects by actively engaging with PIs, mentoring junior staff, and conducting due diligence via interviews, literature reviews, budget estimates, and market reports
- Prepare executive briefings, reports, and presentations for government officials
- Director, Head of Computer Vision (2 years)
^Principal Computer Vision Scientist (1 year)
Atlas5D, Cambridge, MA- Develop unique machine learning techniques for contact-free health sensing, bringing offline prototypes to international commercial deployment in 4 months
- Lead development of deep learning algorithms for fast, competitive computer vision capabilities with live upgrades
- Build cloud infrastructure to automatically train on live data and scale novel AI models to commodity edge platforms
- Senior Robotics Research Scientist (2 years)
^Robotics Research Scientist (4 years)
Philips Innovation Center, Cambridge, MA- Design surgical navigation systems with robotics, computer vision, medical image guidance
- Collaborate on diverse teams with technical experts, clinicians, and business units [2 awards]
- Engineer prototypes, report to stakeholders on analysis, competitive landscape, and IP [20+]
- Publish breakthroughs in visualization, workflow, and UX - peer-reviewed and presented at top-tier conferences ICRA and MICCAI
- Robotics and Computer Vision Engineer (4 summers + 1 winter as intern)
Philips Research, Briarcliff Manor, NY- Design image guidance algorithms for surgical robots via ultrasound and endoscopy
- Develop software for closed-loop robotics, visual servo control, tracking, and navigation
- Research Assistant (5 years as PhD student)
Johns Hopkins University (ERC-CISST/LCSR), Baltimore, MD- Engineer sophisticated, 11-DoF, miniature robots for autonomous heart surgery
- Devise and analyze smart strategies for safe robot control in the heart using 3D ultrasound
- Architect the original framework (electronics, FPGA/firmware, software/API) for the da Vinci Research Kit (dVRK), an open source robot controller now used as a standard platform for surgical robotics research across 40+ institutions worldwide
- Mentor students, evaluate projects, and review assignments in surgical systems courses
- Software Engineer (1 summer as co-op, 1.5 years as full-time contractor)
Sierra Monolithics (Broadband Wireless and Optical Circuits), Redondo Beach, CA- Lead process automation in a rapidly growing semiconductor startup to successful acquisition
- Automate ASIC test protocols, optimize instrument triggers, and streamline report generation
- Collaborate with OEM partners to create intuitive user interfaces for novel, complex circuitry
- Research Assistant (2.5 years as master's student)
California State University, Los Angeles, NASA SPACE Engineering Lab- Develop multiprocessor architecture prototypes using parallel programming and IPC
- Project 1: Fault-tolerant embedded computing to control a segmented space telescope
- Project 2: High volume and robust astronomical image processing and transmission
- Software Engineer (1 summer as intern, 1+ years as freelance contractor)
Unified Dispatch, Altadena, CA- Design and develop first-gen mobile GPS app for transit drivers
- Enable safe navigation with speech UI and fare processing
- Create frenzy at trade shows leading to startup acquisition
Note: Most of the above experiences *overlap* with adjacent ones, for those keeping track.
Projects
Computer vision, AI/ML, & robotics
Autonomous surgical robot with 3D ultrasound guidance in the heart

We develop a minimally invasive surgical robot to extract foreign objects from a beating heart. The system uses computer vision on 3D ultrasound video (transesophageal echocardiogram or TEE) to track the object as it caroms around the chamber, then strategically guides a dexterous robotic device to capture it.
[Project page]
Open source robot controller leading to the da Vinci Research Kit (dVRK)
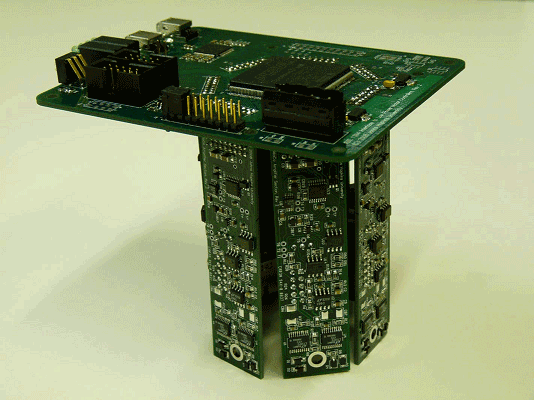
While designing robots with many degrees of freedom (such as the snake robots above and below), we faced issues scaling the number of joints/axes due to cabling complexity. So we invented a fly-by-wire motion controller from scratch with an architecture that could scale over a high speed serial network—IEEE 1394.
This turned out to be more broadly useful, so we open sourced it. The electronics, FPGA/firmware, and software drivers/utilities led to the da Vinci Research Kit (dVRK) robot controller now used as a standard platform for surgical robotics research worldwide.
[Project page]
Snake robot for remote tele-surgery

This teleoperated snake robot is designed to help surgeons perform dexterous tasks in confined spaces. A surgical assistant designed for minimally invasive surgery of the throat and upper airways, it features two miniature manipulators that operate through a single entry port.
[Project page]
Aerospace, astronomy, and beyond
Autonoumous robotic endoscope for beating heart surgery

We use computer vision and visual servoing to robotically maneuver an endoscope based on features extracted from the scope. This can help surgeons navigate the unintuitive scenes caused by the small and rotated endoscopic fields of view. We design methods to be efficient yet robust against imperfect camera calibration.
[BioRob paper]
High performance, fault tolerant computing for the James Webb Space Telescope
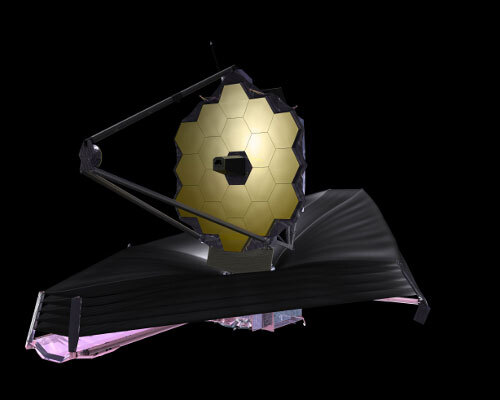
To improve sensitivity to faint signals, the James Webb Space Telescope (JWST) features an extra large reflector that is collaped to fit into contemporary launch vehicles. When deployed, the reflector segments must be actively and precisely controlled to act as a single mirror in a dynamic disturbance environment. We explore parallel processor embedded computing architectures to achieve real-time control of a complex robotic structure.
[Papers: ASME, CCCT]
Optimized and robust astronomical image processing and transmission
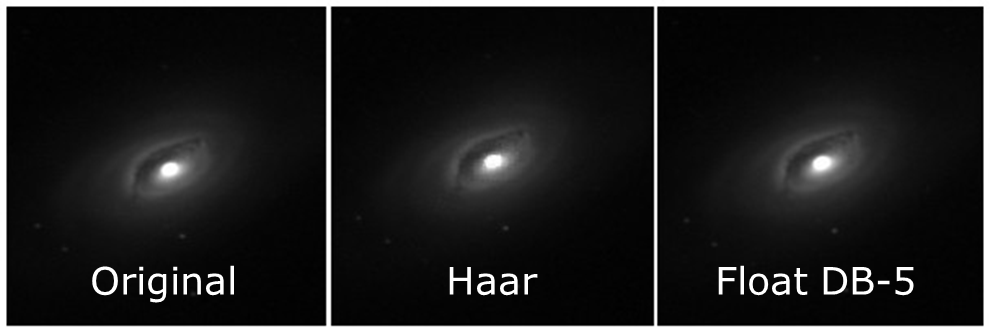
The James Webb Space Telescope (JWST) is designed to collect vast quantities of high quality astronomical images. To facilitate efficient dissemination, we investigate image processing and transmission techniques that prioritize and packetize information content to maximize image quality under channel constraints.
[Papers: SPIE1, SPIE2, SPIE3]
Miscellaneous memorable projects
- Standalone MP3 player: Developed an x86-based embedded system including microprocessor, controllers, DRAM, storage, etc.; drew schematics, timing diagrams; wire-wrapped circuits; programmed in assembly—from the infamous EE 52.
- Operating systems: Wrote kernel-level software on Linux including task queues, scheduler policies, and a filesystem driver loaded as a kernel module—from the lesser known but equally painful CS 134a (now defunct—too painful perhaps).
- Intelligent ICU: Integrated multiple bedside monitoring devices in an intensive care setting by bringing disjoint datastreams into one computer, allowing for intelligent and automated assessment of patient condition. Our group won best course project, in case you like that sort of thing.
- Other fond memories: Projects involving computer architecture, analog/digital circuit design, PCB and VLSI layout, all orders of coding: network, FPGA, µC/µP, embedded, mobile (pre-iPhone though), device driver, UI, scripting, even a bit of web and database. (I don't claim 'current' expertise in all of these things...)
Activities
Volunteering
- Philips Emergency Response Team—On call for emergency assistance, maintain training in First Aid CPR
- LA Inner City Games—Build and run a non-profit computer lab; mentor youths with educational software
- Tutor and mentor local neighborhood kids in K–12 in reading, math, and science
- STEM outreach—Help organize, run, and judge youth robotic competitions; lead lab tours; host visiting students; run open house demos and talks
Scientific reviewer - Regularly referee submissions to premier journals and conferences in robotics, computer vision, and medical image guidance (winning Best Reviewer for MICCAI 2021, 2020, and IPCAI 2017)
- ICRA – IEEE International Conference on Robotics and Automation
- BioRob – IEEE International Conference on Biomedical Robotics and Biomechatronics
- MICCAI – Medical Image Computing and Computer Assisted Interventions
- IJCARS – International Journal for Computer Assisted Radiology and Surgery
- MVAP – Machine Vision and Applications
- JMRR – Journal of Medical Robotics Research
- IPCAI – Information Processing in Computer Assisted Interventions
Events
- Panelist, ARPA-H Autonomous Interventions and Robotics (AIR) (press), 2025
- Advisor, AI & Robotics Excellence in Medicine (post), 2025
- Moderator, ARPA-H Autonomous Robotic Surgery RFI, 2024
- Speaker, IROS Mechanisms and Design Workshop (article, talk), 2020
- Speaker, ICRA Industry Forum (abstract, article), 2019
- Speaker, JHU Robotics Industry Day (article), 2018
- Speaker, Official Visit of the Premier of Queensland, Australia and Delegates to Philips Research, 2018
- Philips CEO & Executive Team - Classified Demo Advanced Robotics AI, 2018
- Philips CTO Office - Special Investigation Anatomical Modeling, 2018
- Speaker, Philips Research Symposium on Physical Modeling, 2017
- Host, ESCP Business School Paris Visit to Philips Research, 2017
Athletic
- Intercollegiate (NCAA Division III) soccer, track & field (4 years)
- Interscholastic (Los Angeles City Section) soccer, track & field, cross-country (4, 3, 2 years)
- Intramural basketball, soccer, track & field (great exercise w/multiple championships)
Achievements
Professional honors
- IPCAI Best Reviewer Award
- MICCAI Outstanding Reviewer Award (2x)
- Philips Accelerator Entrepreneurial Team Award
- Philips Innovation X-Challenge 3rd Prize
Graduate fellowships
- Philips Research (4y)
- Transportation Research Board (travel)
- Cal State LA Graduate Fellowship (2y)
- Cal State LA Engineering Ben Levine
Undergrad scholarships
- Robert C. Byrd Honors (statewide, 4y)
- Los Angeles Inner City Games (citywide)
- Los Angeles Unified School District Employees
- John Wooley Memorial (student-athlete)
Athletic distinctions
- Finalist, Los Angeles City Section triple jump
- Captain, varsity soccer and cross-country teams
- All-Conference, NCAA Div. III 4x100m and 4x400m relays
- Coaches' Award, scholastic track & field and collegiate soccer
- Athlete of the Week, scholastic and collegiate
- Champion, Caltech high jump competition
Honorable mentions
- Admitted to NASA/JPL Planetary Science Summer School
- Mock Trial team ranked #1 in Los Angeles County (at one point)
- Best Project: Intelligent ICU (600.446: Computer Integrated Surgery)
- Al Bundy award for over-representation of high school sports accomplishments

Reports
- P. Thienphrapa, “A minimally invasive surgical system for 3D ultrasound guided robotic retrieval of foreign bodies from a beating heart,” PhD dissertation, Johns Hopkins University.
- P. Thienphrapa, “A centralized processing, distributed I/O motor controller based on IEEE 1394 for the Snake Robot,” Master's thesis, Johns Hopkins University.
Publications
- P. Thienphrapa, C. Lundin, X. He, M.Y. Jung, P. U-Thainual, and C. Kung, “Top medical robotics engineers share 5 key lessons,” in IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS) Mechanisms and Design Workshop, Las Vegas, NV, Oct 2020.
- P. Thienphrapa, T. Bydlon, A. Chen, P. Vagdargi, N. Varble, D. Stanton, and A. Popovic, “Interactive endoscopy: A next-generation, streamlined user interface for lung surgery navigation,” in Int. Conf. on Medical Image Computing and Computer Assisted Intervention (MICCAI), vol. 11768, pp. 83–91, Shenzhen, China, Oct 2019 (Early accept, top 17%).
- P. Thienphrapa, P. Vagdargi, A. Chen, and D. Stanton, “User centric device registration for streamlined workflows in surgical navigation systems,” in IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 2641–2647, Montreal, Canada, May 2019.
- P. Thienphrapa, B. Mory, A. Panse, V. Pai Raikar, A. Torjesen, and D. Schulman, “Basic principles for integrating next generation technologies into surgical workflows,” in ICRA Next Generation Surgery Workshop, May 2019.
- P. Thienphrapa, B. Mory, A. Panse, V. Pai Raikar, A. Torjesen, and D. Schulman, “Healthcare 2.0: How robotics and AI are revolutionizing clinical workflows,” in ICRA Industry Forum, May 2019.
- P. Thienphrapa, T. Bydlon, A. Chen, and A. Popovic, “Evaluation of surface feature persistence during lung surgery,” in Biomedical Engineering Society (BMES) Annual Meeting, Atlanta, GA, Oct 2018.
- P. Vagdargi, P. Thienphrapa, A. Chen, and T. Bydlon, “Towards augmented reality for lung surgery,” in National Center for Image Guided Therapy Workshop, Boston, MA, Oct 2018.
- P. Thienphrapa, A. Popovic, and R. Taylor, “Guidance of a high dexterity robot under 3D ultrasound for minimally invasive retrieval of foreign bodies from a beating heart,” in IEEE Int. Conf. on Robotics and Automation (ICRA), pp. 4869–4874, Hong Kong, China, May 2014.
- P. Thienphrapa, A. Popovic, and R. Taylor, “3D ultrasound-guided retrieval of foreign bodies from a beating heart using a dexterous surgical robot,” in Hamlyn Symposium on Medical Robotics, London, UK, Jun 2013.
- P. Thienphrapa, B. Ramachandran, H. Elhawary, A. Popovic, and R. Taylor, “Intraoperative analysis of locations for 3D ultrasound-guided capture of foreign bodies from a beating heart,” in Hamlyn Symposium on Medical Robotics, London, UK, Jul 2012.
- P. Thienphrapa, B. Ramachandran, R. Taylor, and A. Popovic, “A system for 3D ultrasound-guided robotic retrieval of foreign bodies from a beating heart,” in IEEE RAS/EMBS Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob), pp. 743–748, Rome, Italy, Jun 2012.
- P. Thienphrapa, B. Ramachandran, H. Elhawary, R. Taylor, and A. Popovic, “Multiple capture locations for 3D ultrasound-guided robotic retrieval of moving bodies from a beating heart,” in SPIE 8316, Medical Imaging 2012: Image-Guided Procedures, Robotic Interventions, and Modeling, pp. 831619, San Diego, CA, Feb 2012.
- B. Ramachandran, P. Thienphrapa, A. Jain, and A. Popovic, “Tracking using 3D ultrasound for guiding cardiac interventions,” in Int. Conf. on Biomedical Engineering (ICBME), Manipal, India, Dec 2011.
- P. Thienphrapa and P. Kazanzides, “Design of a scalable real-time robot controller and application to a dexterous manipulator,” in IEEE Int. Conf. on Robotics and Biomimetics (RoBio), pp. 2295–2300, Phuket, Thailand, Dec 2011.
- P. Thienphrapa, H. Elhawary, B. Ramachandran, D. Stanton, and A. Popovic, “Tracking and characterization of fragments in a beating heart using 3D ultrasound for interventional guidance,” in Int. Conf. on Medical Image Computing and Computer Assisted Intervention (MICCAI), vol. 6891, pp. 211–218, Toronto, Canada, Sep 2011.
- A. Popovic and P. Thienphrapa, “An approach to robotic guidance of an uncalibrated endoscope in beating heart surgery,” in IEEE RAS/EMBS Int. Conf. on Biomedical Robotics and Biomechatronics (BioRob), pp. 106–113, Tokyo, Japan, Sep 2010.
- P. Thienphrapa and P. Kazanzides, “A scalable system for real-time control of dexterous surgical robots,” in IEEE Int. Conf. on Technologies for Practical Robot Applications (TePRA), pp. 16–22, Boston, MA, Nov 2009.
- P. Thienphrapa and P. Kazanzides, “A distributed I/O low-level controller for highly-dexterous snake robots,” in IEEE Biomedical Circuits and Systems Conference (BioCAS), pp. 9–12, Baltimore, MD, Nov 2008.
- P. Kazanzides and P. Thienphrapa, “Centralized processing and distributed I/O for robot control,” in IEEE Int. Conf. on Technologies for Practical Robot Applications (TePRA), pp. 84–88, Boston, MA, Nov 2008.
- P. Thienphrapa and J. Dong, “A robust transmission system for astronomical images over error-prone links,” in SPIE Newsroom, Dec 2006. [DOI]
- P. Thienphrapa, H. Boussalis, C. Liu, K. Rad, and J. Dong, “Implementation of a robust transmission system for astronomical images over error-prone links,” in SPIE 6391, Multimedia Systems and Applications IX, pp. 63910G, Boston, MA, Oct 2006.
- P. Thienphrapa, H. Boussalis, C. Liu, K. Rad, J. Dong, “Content-based retransmission with error concealment for astronomical images,” in SPIE 6015, Multimedia Systems and Applications VIII, pp. 60150J, Boston, MA, Oct 2005.
- S. Fallorina, P. Thienphrapa, R. Luna, V. Khuong, H. Boussalis, C. Liu, J. Dong, K. Rad, and W. Ho, “A fault-tolerant distributed data flow architecture for real-time decentralized control,” in Int. Conf. on Informatics in Control, Automation and Robotics (ICINCO), pp. 109–115, Barcelona, Spain, Sep 2005.
- H. Boussalis, C. Liu, K. Rad, J. Dong, S. Fallorina, P. Thienphrapa, and J. Roberts, “Integrated embedded architectures and parallel algorithms for a decentralized control system,” in IEEE Int. Sym. on Intelligent Control (ISIC), Mediterranean Conf. on Control and Automation, pp. 1567–1572, Limassol, Cyprus, Jun 2005.
- J. Roberts, H. Boussalis, C. Liu, J. Dong, K. Rad, P. Thienphrapa, Z. Purnajo, and S. Fallorina, “Efficient real-time parallel signal processing for decentralized control using group-pipelined scheduling,” in Information Systems: New Generations Conference (ISNG), Las Vegas, NV, Nov 2004.
- S. Fallorina, H. Boussalis, C. Liu, K. Rad, J. Dong, D. Nasser, and P. Thienphrapa, “A generic pipelined task scheduling algorithm for fault-tolerant decentralized control of a segmented telescope testbed,” in ASME Computers and Information in Engineering Conference (CIE), vol. 4, pp. 493–500, Salt Lake City, UT, Sep 2004.
- P. Thienphrapa, S. Fallorina, Z. Purnajo, E. Prince, H. Boussalis, C. Liu, K. Rad, J. Dong, and Y. Zhao, “A generalized fault-tolerant pipelined task scheduling for decentralized control of large segmented systems,” in Int. Conf. on Computing, Communications, and Control Technologies (CCCT), Austin, TX, Aug 2004.
Patents
Granted Highlights listed first
- P. Thienphrapa, T. Bydlon, A. Chen, P. Vagdargi, and W. McNamara, “Interactive endoscopy for intraoperative virtual annotation in VATS and minimally invasive surgery,” JP7577737B2, US12347216B2, Jul 2025.
- P. Thienphrapa, M. Flexman, T. Bydlon, A. Popovic, M. Balicki, G. Toporek, and A. Patriciu, “Autonomous X-ray control for robotic navigation,” JP7191098B2, US11648071B2, EP3709885B1, CN111479507B, Jul 2024.
- P. Thienphrapa, B. Ramachandran, A. Reinstein, and D. Stanton, “Registration system for medical navigation and method of operation thereof,” CN108472082B, EP3397183B1, US11826107B2, Nov 2023.
- P. Thienphrapa, B. Ramachandran, and A. Popovic, “Automatic online registration between a robot and images,” RU2624107C2, EP2745268B1, US9984437B2, CN103797512B, JP6491476B2, BR112014005451B1, Nov 2021.
- A. Popovic and P. Thienphrapa, “Uncalibrated visual servoing using real-time velocity optimization,” US8934003B2, EP2521507B1, JP5814938B2, US9205564B2, CN102791214B, Jan 2016.
--- - M. Balicki and P. Thienphrapa, “Systems and methods for guiding an ultrasound probe,” EP4072430B1, US12274580B2, JP7724407B2, CN114945327B, Dec 2025.
- T. Bydlon, P. Thienphrapa, and A. Chen, “Dynamic interventional three-dimensional model deformation,” JP7527302B2, US12229950B2, CN113614844B, Sep 2025.
- M. Flexman, P. Thienphrapa, T. Bydlon, A. Patriciu, and A. Panse, “OSS guidance and monitoring system, controller, and method,” JP7304814B2, US12396807B2, Aug 2025.
- P. Thienphrapa, S. Kyne, M. Flexman, A. Jain, S. Li, K. Vaidya, and M. Balicki, “Hybrid robotic-image plane control of a tee probe,” US12257104B2, JP7715149B2, EP4072429B1, Aug 2025.
- T. Bydlon, A. Ekin, P. Thienphrapa, W. Van Den Boomen, M. Flexman, M. Van Der Mark, and A. Popovic, “Systems and methods for determining the length of a non-shape-sensed interventional device with a shape-sensed guidewire and determining a state of the guidewire with respect to an interventional device,” US11346730B2, JP7292205B2, CN110049741B, EP3547946B1, Aug 2025.
- P. Thienphrapa, N. Kahya, O. Nempont, P. Cathier, M. Flexman, T. Bydlon, and R. Florent, “Animated position display of an OSS interventional device,” US11887236B2, CN111566744B, Mar 2025.
- M. Flexman, A. Reinstein, X. He, P. Thienphrapa, D. Dijkkamp, and D. Noonan, “Triggering with optical shape sensing fiber,” US11191593B2, EP3200715B1, Feb 2025.
- P. Thienphrapa, M. Flexman, T. Bydlon, A. Popovic, M. Balicki, G. Toporek, and A. Patriciu, “Robotic tool control,” US11602403B2, JP7401429B2, EP3709926B1, CN111343941B, Feb 2025.
- P. Thienphrapa, P. Cathier, A. Panse, M. Flexman, T. Bydlon, and N. Kahya, “Torsional deployment detection of a vascular therapy,” US11589943B2, CN111741728B, JP7569687B2, Oct 2024.
- P. Thienphrapa, T. Bydlon, P. Vagdargi, S. Kyne, and A. Popovic, “Guided anatomical visualization for endoscopic procedures,” US11937883B2, Mar 2024.
- M. Flexman, M. Marell, and P. Thienphrapa, “Balloon catheter comprising shape sensing optical fibers,” EP3484572B1, JP7059247B2, CN109475725B, US11730931B2, Aug 2023.
- P. Thienphrapa, B. Ramachandran, M. Flexman, and N. Kahya, “Medical navigation system employing optical position sensing and method of operation thereof,” JP6907247B2, US11224405B2, CN109982656B, EP3478207B1, Aug 2023.
- P. Thienphrapa, T. Bydlon, M. Flexman, A. Patriciu, A. Panse, and S. Kyne, “Systems and methods for determining the position of a non-shape-sensed guidewire with a shape-sensed catheter and for visualizing the guidewire,” US11344222B2, EP3554367B1, Mar 2023.
- A. Ekin, M. Flexman, P. Thienphrapa, and W. Van Den Boomen, “OSS foreshortening detection systems, controllers and methods,” JP7216655B2, US11602396B2, Mar 2023.
- P. Thienphrapa and A. Popovic, “Registration of a surgical image acquisition device using contour signatures,” US11564748B2, Jan 2023.
- T. Bydlon, P. Thienphrapa, and M. Flexman, “Medical navigation system using shape-sensing device and method of operation thereof,” EP3565482B1, JP7167030B2, US11547318B2, Jan 2023.
- A. Panse, T. Bydlon, P. Thienphrapa, M. Flexman, A. Patriciu, and S. Kyne, “Shape sensing of multiple over-the-wire devices,” US11547489B2, Jan 2023.
- A. Popovic, P. Thienphrapa, and G. Toporek, “Image-based fusion of endoscopic image and ultrasound images,” EP3463032B1, CN109219384B, JP7133474B2, Sep 2022.
- X. He, A. Popovic, M. Flexman, P. Thienphrapa, D. Noonan, R. Kroon, and A. Reinstein, “Shape sensing for orthopedic navigation,” JP6713987B2, US11219487B2, Jan 2022.
- G. Cole, P. Thienphrapa, M. Flexman, D. Noonan, and N. Kahya, “System and method for tracking and determining characteristics of inflatable medical instruments using fiber-optical realshape data,” EP3313498B1, JP6739454B2, US11039890B2, Jun 2021.
Pending
- A. Popovic and P. Thienphrapa, “Robotic control of an oblique endoscope for FOV images,” WO2012001549A1, Priority Jun 2010.
- P. Thienphrapa and X. He, “System and method for registering a structure using fiber-optical realshape data,” WO2016207163A1, Priority Jun 2015.
- T. Bydlon, P. Thienphrapa, and A. Torjesen, “Registering optical shape sensing device with three-dimensional representation of region of interest,” WO2020002176A2, Priority Jun 2018.
- T. Bydlon, P. Thienphrapa, and A. Chen, “Intraoperative imaging-based surgical navigation,” WO2020234409A1, Priority May 2019.
- T. Bydlon, S. Kyne, and P. Thienphrapa, “Dynamic tissue imagery updating,” WO2021074422A1, Priority Oct 2019.
- P. Thienphrapa, S. Kyne, M. Flexman, A. Jain, S. Li, K. Vaidya, and M. Balicki, “Intuitive control interface for a robotic tee probe using a hybrid imaging-elastography controller,” WO2021115905A1, Priority Dec 2019.
- P. Thienphrapa, M. Balicki, and W. Mcnamara, “Systems and methods for guiding an ultrasound probe,” WO2021115944A1, Priority Dec 2019.